双腕ロボットAIの開発を支援するデータセットを無償公開
両手を使うロボットAI開発の足がかりを提供
ポイント
・ 器用な動作の実現を目指した双腕ロボットの作業データセット「AIST-Bimanual Manipulation」を無償公開
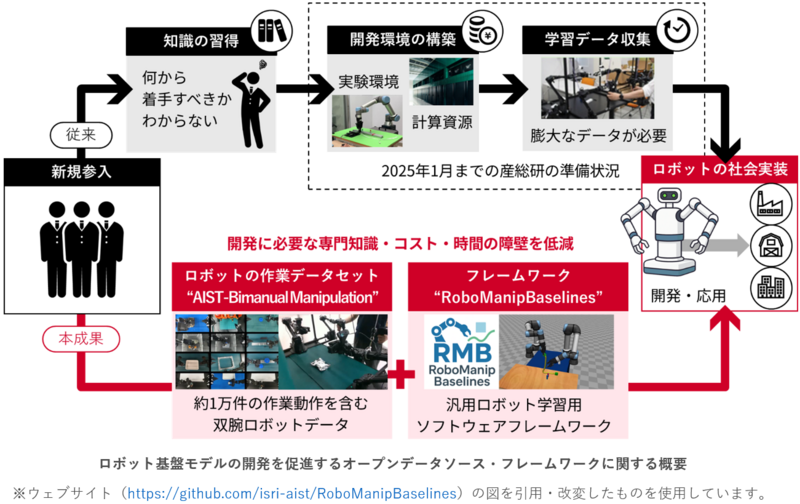
・ 既に公開されているソフトウエアフレームワーク「RoboManipBaselines」との連携により、開発環境構築が容易となり、双腕ロボットAI開発の参入障壁が低減
・ 製造業・物流・介護分野の人手不足解決と日本のロボットAI競争力向上に貢献
概 要
国立研究開発法人 産業技術総合研究所(以下「産総研」という)人工知能研究センター 元田智大 研究員、インテリジェントシステム研究部門 室岡雅樹 主任研究員らは、人間のように両手を器用に使うロボットAI の開発を加速させる大規模データセット「AIST-Bimanual Manipulation」を開発し、オープンデータソースとして無償公開しました。
これまでロボットの学習には「何から始めればよいか分からない」「学習用データがない」「開発環境の構築に高額な費用がかかる」という課題がありました。既に産総研から無償で公開されているソフトウエアフレームワーク「RoboManipBaselines」に加え、本データセットで提供する約1万件のアクションシーケンスを含む大規模な双腕ロボットの作業データにより、企業や研究機関がゼロから開発する必要がなく、短期間で研究開発をスタートできるようになります。
さらに、従来のロボット学習データは片腕での作業が中心でしたが、本データセットでは「一方の手で物を押さえながら、もう一方の手で精密な作業を行う」といった人間らしい双腕協調作業を収録しています。これにより、製造業や物流、介護など人手不足が深刻な分野での実用的なロボット開発に貢献します。
なお、これらの技術の詳細は、2025年9月3日に第43回日本ロボット学会学術講演会で発表されます。また、「RoboManipBaselines」と「AIST-Bimanual Manipulation」はGitHub(https://github.com/isri-aist/RoboManipBaselines, https://aistairc.github.io/aist_bimanip_site/)からダウンロード可能です。
下線部は【用語解説】参照
開発の社会的背景
日本では少子高齢化による人手不足が深刻化しています。特に製造業、物流、介護などの現場では、人間がこれまで担ってきた複雑な作業をロボットで代替する必要性が高まっています。しかし、これらの現場で求められる両手を使った複雑な作業をロボットが行うには、膨大な学習データと専門的な開発環境が必要でした。
例えば、組み立て作業では「片方の手で部品を固定し、もう片方の手でネジを締める」、物流では「箱を持ち上げながら配置を調整する」、家庭では「洗濯物を広げて畳む」といった両手を協調させる作業が日常的に必要とされます。これらは人間にとっては当たり前の動作ですが、ロボットにとっては非常に難しい課題です。
こうした背景から、世界的な大手AI企業などは大規模な投資に基づき、ロボットの基盤モデル開発を進めています。日本企業の参入も期待されますが、設備など初期投資の負担やノウハウ不足のため、新規に参入することが難しい状況が続いています。
また、AI技術の進展により、言葉や画像を理解して行動する「フィジカルAI」への関心が世界的に高まっています。しかし、日本国内ではロボットの学習に必要なノウハウや大規模データ、開発環境が十分であるとはいえず、この分野での研究開発が遅れていました。
産総研では、こうした課題を解決するため、初学者でも簡単に双腕ロボットの開発に取り組める環境を整備し、製造業や物流、介護現場などで活用できるロボット技術の早期実用化を目指しています。
研究の経緯
産総研は、2025年1月に「実世界の困難作業自動化を目指したロボット基盤モデルの研究開発を本格始動」という研究方針を発表し、産総研のロボット・データ・計算資源を活用した産業界との新たな橋渡しを目指すことを表明しました(2025年1月23日 産総研プレス発表)。今回はその構想を実現した具体的な成果として、実際に完成したデータセットとソフトウエア基盤を無償公開するに至りました。産総研では従来、ロボットの知能化研究として双腕ロボット学習に関する学習モデルの開発*に取り組んでおり、近年はAI技術の急速な進展を受け、特に双腕作業ロボットの学習に必要な大規模データを効率的に収集する手法の開発に注力してきました。
研究の内容
本研究では、ロボットAIの開発を加速させるために、二つの技術的な基盤を公開しています。一つは大規模な双腕作業データを集めた「AIST-Bimanual Manipulation(産総研双腕マニピュレーション)」データセット、もう一つはそのデータを活用して学習するための「RoboManipBaselines」ソフトウエアフレームワークです。「AIST-Bimanual Manipulation」データセットは今回新たに開発・公開したものであり、「RoboManipBaselines」は、2025年1月の公開以降、継続的にアップデートを行っています。以下では、それぞれの特徴と開発過程について説明します。
AIST-Bimanual Manipulation:器用さを獲得するための基礎となる双腕協調データセット
「AIST-Bimanual Manipulation」データセットは、双腕ロボットによる約1万件の作業記録を収めた大規模なものです。特徴的なのは、日常生活から産業現場まで幅広いシーンを想定した作業を網羅していることです(図1)。
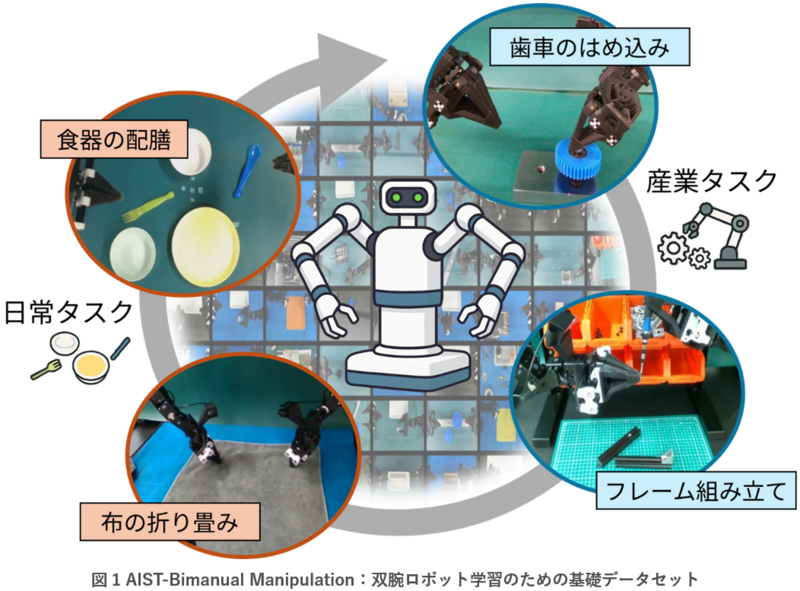
このデータセットは、一方の手で物体を固定しながら、もう一方の手で細かい操作をするといった、人間ならではの協調動作を含んでおり、ロボットが両手を使って器用な作業をするための基礎となるものです。ユーザーはこのデータセットと最新の学習モデルを活用することで、現在のロボットがどれだけ器用な作業を実現できるのかを検証、改良し、具体的な応用を想定した追加学習などを実証することができるようになります。
データ収集には、リーダーフォロワー型遠隔操作システムであるALOHAと呼ばれる装置を使用しました(図2)。このシステムでは、操作者(人間)によるリーダーアームの動きを、フォロワーアームが同期し、リアルタイムで再現します。データ収集では、熟練した操作者がさまざまな作業を行い、その際のロボットの動き、カメラ映像、作業内容の説明などを詳細に記録しています。

RoboManipBaselines:ロボット学習のためのオープンソフトウエアフレームワーク
「RoboManipBaselines」は、ロボットによる模倣学習の研究開発および社会実装を促進することを目指して構築されたソフトウエアフレームワークです(図3)。このフレームワークの特徴は、複数のシミュレーターやロボット実機を共通のインターフェースで扱える汎用性、新しいロボットや学習手法を容易に追加できる拡張性、異なる手法を同一の条件下で比較・検証できる再現性を備えていることです。
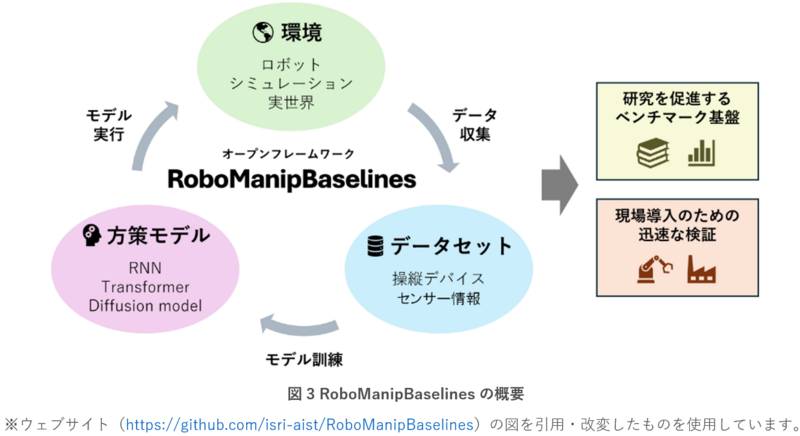
このフレームワークの開発では、「使いやすさ」と「最新技術の導入のしやすさ」を両立させることに注力しました。具体的には、ソフトウエアの設計を以下のようなモジュール構造にしています。
- 環境: シミュレーション上や実世界のさまざまな形態のロボットによるタスク実行環境
- データセット処理:収集済みデータの公開と追加データ収集のためのインターフェースの提供
- 方策モデル(学習モデル):複数種類の最新学習手法を切り替えて試せる訓練・実行プログラム
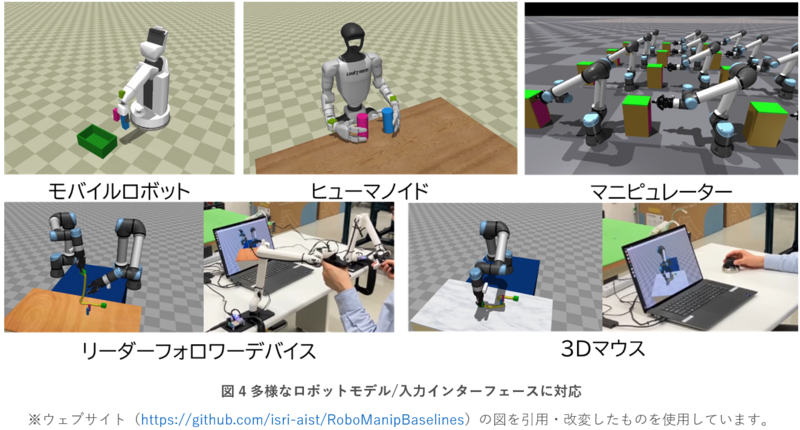
これにより、「データを入れて、学習モデルを訓練し、結果を評価する」という一連の流れを、プログラミングの詳細な知識がなくても実行できるようになっています。さらに、2025年1月の既報以降のアップデートでは、さまざまなロボットやテレオペレーションインターフェースへの対応(図4)を実現し、開発効率を高めるためのコードのリファクタリングも行いました。本フレームワークは、既に技術コンサルティングにおいて企業から提供されたタスクのデータ収集や学習モデルの訓練・実行で利用され、さらに外部の利用者によって新たなロボットへの適用事例まで報告されており、今後さらに利用が拡大していくことが期待されます。
開発した「AIST-Bimanual Manipulation」と「RoboManipBaselines」の有効性を検証するため、また、産業応用の観点から、工場での部品組み立て作業を模した実験を行いました。その結果、一方の手で部品を固定しながら、もう一方の手で精密な作業を行うという、人間の作業者が日常的に行っている動作をロボットが学習により再現できることを確認しました。このような複雑な動作を、プログラミングではなく「データからの学習」によって実現できることを示した意義は大きいといえます。
今後の予定
開発したロボットデータセットとソフトウエアフレームワークをさらに拡充し、より多様で複雑な作業に対応できるようにするとともに、言語指示による直感的なロボット制御を実現する「視覚-言語-動作」統合型のロボット基盤モデルの開発を目指します。これにより、AI開発を始めたばかりの人でも簡単にロボットを活用できる社会の実現に貢献していきます。
研究者情報
人工知能研究センター 実体知能研究チーム 元田智大 研究員
インテリジェントシステム研究部門CNRS-産総研ロボット工学連携研究室 室岡雅樹 主任研究員
人工知能研究センター 実体知能研究チーム 中條亨一 産総研特別研究員
人工知能研究センター 尾形哲也 特定フェロー
人工知能研究センター 実体知能研究チーム 原田研介 特定フェロー
人工知能研究センター 実体知能研究チーム 堂前幸康 研究チーム長
用語解説
ALOHA
低コストかつオープンソースであり、スタンフォード大学の研究チームによって提案されたリーダーフォロワーシステムである。人間が操作するリーダーロボットと、それに連動して動作するフォロワーロボットの構成を採用したマニピュレーターである。
入手先
以下からダウンロード可能です。
「RoboManipBaselines」
https://github.com/isri-aist/RoboManipBaselines
「AIST-Bimanual Manipulation」
https://aistairc.github.io/aist_bimanip_site/
参考情報
*Tomohiro Motoda, Ryo Hanai, Ryoichi Nakajo, Masaki Murooka, Floris Marc Arden Erich, and Yukiyasu Domae,
Learning Bimanual Manipulation via Action Chunking and Inter-Arm Coordination with Transformers,
In Proceeding of 2025 IEEE 21st International Conference on Automation Science and Engineering (CASE), 2025.
プレスリリースURL
https://www.aist.go.jp/aist_j/press_release/pr2025/pr20250902/pr20250902.html
本プレスリリースは発表元が入力した原稿をそのまま掲載しております。また、プレスリリースへのお問い合わせは発表元に直接お願いいたします。
プレスリリース添付画像
このプレスリリースには、報道機関向けの情報があります。
プレス会員登録を行うと、広報担当者の連絡先や、イベント・記者会見の情報など、報道機関だけに公開する情報が閲覧できるようになります。
このプレスリリースを配信した企業・団体
- 名称 国立研究開発法人産業技術総合研究所
- 所在地 茨城県
- 業種 政府・官公庁
- URL https://www.aist.go.jp/

過去に配信したプレスリリース
ここにどうして蛇紋岩?
7/24 22:00
植物由来の分子で環境発電
7/21 14:00
バイオものづくり由来の廃棄物と廃水をまとめて処理してエネルギー回収
7/8 14:00
世界最高精度で曲面ミラーの形状を測る装置を開発
7/6 14:00
産総研、製造AX拠点を始動
7/2 14:23
“松やに”から黒鉛製造
7/1 18:00
次世代XRコンテンツ産業を規格が後押し
6/29 14:00
「棄てる」廃水処理から「活かす」廃水処理へ
6/24 14:00
運動をすると認知課題中の脳活動が変化する
6/11 14:00
瀬戸内海燧灘(ひうちなだ)において海底活断層の分布を明らかに
5/29 14:00
麹菌に有用物質の“設計図”を素早く読み込ませる方法
5/28 14:00
標準的な製法×新組成設計で、より硬くて変形しにくいガラスに
5/27 14:00